Адаптивные блок-фары (AFS) Discovery 3
- ‹‹‹ Абсорбер паров топлива Range Rover 3
- Адгезионные материалы для несущих элементов кузова Freelander 1 ›››
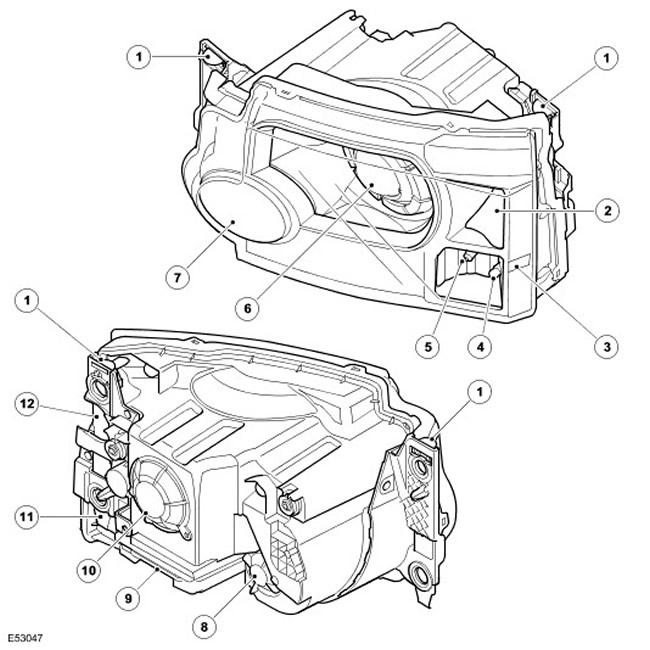
Адаптивная ксеноновая блок-фара
| Наименование пункта | Каталожный номер запасной части | Описание |
| 1 | - | Стопорная планка |
| 2 | - | Указатель поворота |
| 3 | - | Боковой габаритный фонарь (только для США) |
| 4 | - | Габаритный фонарь |
| 5 | - | Боковые фонари с отклоняемой осью (за исключением автомобилей для рынка США) |
| 6 | - | Адаптивная ксеноновая фара ближнего/дальнего света |
| 7 | - | Галогенная фара дальнего света |
| 8 | - | Крышка служебного лючка фары дальнего света |
| 9 | - | Контроллер ксеноновой фары |
| 10 | - | Крышка служебного лючка фары ближнего/дальнего света |
| 11 | - | Крышка служебного лючка габаритного фонаря и бокового фонаря с отклоняемой осью (не показана) |
| 12 | - | Крышка служебного лючка указателя поворота (не показана) |
Новые адаптивные блок-фары предназначены для улучшения обзора в различных условиях движения. При выполнении поворота адаптивные блок-фары улучшают освещение той части дороги, где предстоит продолжать движение. Оптимизация положения светового пучка в горизонтальной плоскости выполняется автоматически на основании данных о положении рулевого вала и сведений от других датчиков бортовой системы.
Адаптивные блок-фары поставляются только с ксеноновыми лампами, в состав системы входит контур динамического коррекции наклона фар, описание которого приводится в разделе «Коррекция наклона фар».
Внутри блок-фары находится модуль двухрежимной ксеноновой фары, положение которого в вертикальной и горизонтальной плоскостях регулируется электродвигателем моторедуктора в соответствии с профилем дороги и радиусом поворота. Менять своё положение может только прожектор с двухрежимными ксеноновыми фарами, тогда как фара дальнего света с галогенной лампой остаётся неподвижной.
Адаптивные блок-фары управляются собственным контроллером, который расположен в нижней части стойки «А», за блоком CJB. Контроллер регулирует положение ксенонового прожектора по вертикали и горизонтали в зависимости от работы боковых фонарей с отклоняемой осью, которая запрашивается контроллером адаптивных блок-фар, но регулируется блоком CJB.
Принцип работы AFS
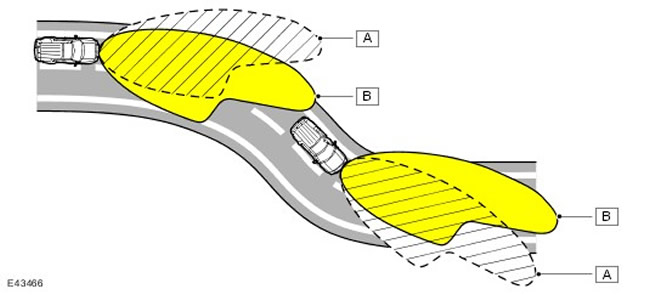
| A | Диаграмма распределения освещения для обычной фары |
| B | Диаграмма распределения освещения для адаптивных фар |
Контроллер AFS
Контроллер AFS является устройством двойного назначения, в котором имеется также программное обеспечение для динамической коррекции наклона фар. Контроллер AFS присоединён к скоростной шине CAN и получает сведения от других бортовых систем относительно следующих параметров:
- Угол поворота рулевого колеса - от датчика угла поворота рулевого колеса
- Скорость движения автомобиля - от контроллера ABS
- Состояние ближнего света фар - от панели приборов
- Высоте подвески - от контроллера пневматической подвески
- Показания одометра - только в целях диагностики
- Работа двигателя - от ECM
- Положение передач - от блока управления коробкой передач или контроллера раздаточной коробки
- Прокручивание коленчатого вала двигателя - от ECM
- Температура снаружи/внутри салона - только в целях диагностики
Адаптивные блок-фары могут работать, только если контроллер AFS получит сигнал подтверждения работы двигателя по шине CAN. Если сигнал подтверждения работы двигателя получен и переключатель освещения установлен в положение включения фар, контроллер адаптивных блок-фар выполняет инициацию.
Система AFS будет активирована также в том случае, когда переключатель освещения находится в положении AUTo, а контроллер AFS получит сигнал необходимости включения освещения от датчика дождя/освещённости и сигнал подтверждения работы двигателя.
После этого контроллер AFS начинает отслеживать входные сигналы от других бортовых систем автомобиля и управлять фарами в соответствии со скоростью автомобиля и радиусом поворота.
Контакты разъёма C2193 контроллера AFS
| № контакта | Описание | Входной сигнал/выходной сигнал |
| 1 | "Масса" | Входной сигнал |
| 2 и 3 | Не используется | - |
| 4 | Линия CAN высокого уровня | Входной сигнал/выходной сигнал |
| 5 | Линия CAN низкого уровня | Входной сигнал/выходной сигнал |
| 6 | Сигнал моторедуктора курсового привода правой фары | Выходной сигнал |
| 7 | Сигнал моторедуктора курсового привода правой фары | Выходной сигнал |
| 8 | Не используется | - |
| 9 | Электродвигатель моторедуктора коррекции наклона правой фары 1 - "положительный" (+) | Выходной сигнал |
| 10 | Электродвигатель моторедуктора коррекции наклона правой фары 1 - "отрицательный" (-) | Входной сигнал |
| 11 | Электродвигатель моторедуктора коррекции наклона правой фары 2 - "положительный" (+) | Выходной сигнал |
| 12 | Электродвигатель моторедуктора коррекции наклона правой фары 2 - "отрицательный" (-) | Входной сигнал |
| 13 | Питание от зажигания 12 В | Входной сигнал |
| от 14 до 17 | Не используется | - |
| 18 | Сигнал моторедуктора курсового привода левой фары | Выходной сигнал |
| 19 | Сигнал моторедуктора курсового привода левой фары | Выходной сигнал |
| 20 | Не используется | - |
| 21 | Электродвигатель моторедуктора коррекции наклона левой фары 1 - "положительный" (+) | Выходной сигнал |
| 22 | Электродвигатель моторедуктора коррекции наклона левой фары 1 - "отрицательный" (-) | Входной сигнал |
| 23 | Электродвигатель моторедуктора коррекции наклона левой фары 2 - "положительный" (+) | Выходной сигнал |
| 24 | Электродвигатель моторедуктора коррекции наклона левой фары 2 - "отрицательный" (-) | Входной сигнал |
Режимы работы
Система AFS может работать в четырёх режимах:
- Режим маневрирования
- Обычный режим движения
- Режим движения на высокой скорости
- Режим движения задним ходом
Режим маневрирования используется при движении со скоростью до 30 км/ч. В режиме маневрирования двигается только один ксеноновый прожектор с той стороны, в которую осуществляется поворот, например, левый прожектор двигается влево при выполнении левого поворота. Прожектор с противоположной стороны не двигается. В данном режиме максимальный угол поворота курсового привода прожектора составляет 15 градусов.
Обычный режим движения используется при движении со скоростью 30-70 км/ч. В обычном режиме движения двигаются оба ксеноновых прожектора в соотношении 3:1, например, во время левого поворота левый прожектор поворачивается на 3 градуса, а правый - на 1 градус. В данном режиме максимальный угол поворота курсового привода прожектора по направлению поворота составляет 12 градусов.
Режим движения на высокой скорости используется при движении со скоростью свыше 70 км/ч. В режиме движения на высокой скорости двигаются оба ксеноновых прожектора в соотношении 3:1, например, во время левого поворота левый прожектор поворачивается на 3 градуса, а правый - на 1 градус. В данном режиме максимальный угол поворота курсового привода прожектора по направлению поворота составляет 10 градусов.
В режиме движения задним ходом курсовой привод фар отключается при включении передачи заднего хода. Прожекторы системы AFS передвигаются в центральное положение, а боковые фонари с отклоняемой осью, если включены, отключаются. Если выполняются необходимые условия (т.е. скорость автомобиля превышает 3 км/ч), при выключении передачи заднего хода прожекторы системы AFS двигаются в положение, соответствующее углу поворота рулевого колеса, и боковые фонари с отклоняемой осью включаются.
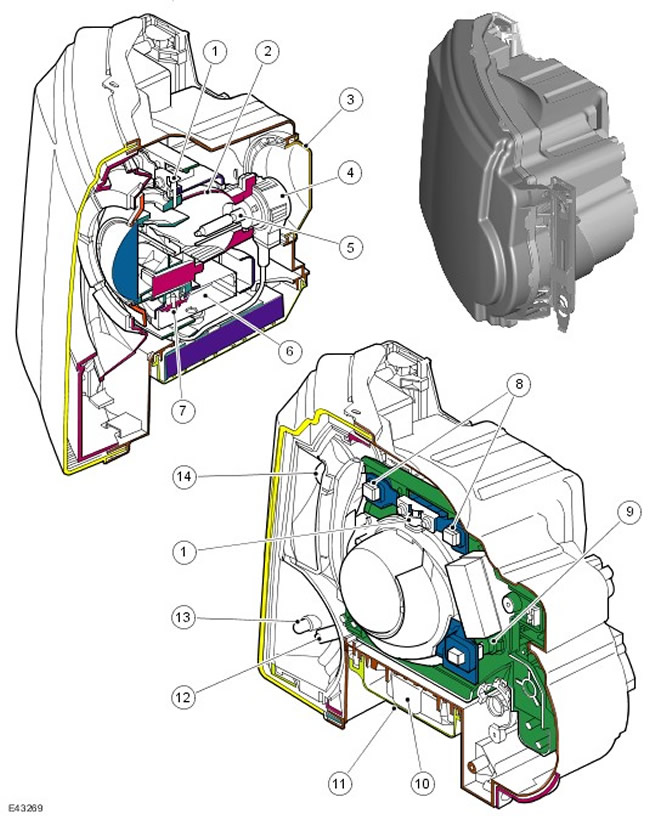
Адаптивные ксеноновые блок-фары
| Наименование пункта | Каталожный номер запасной части | Описание |
| 1 | - | Горизонтальная ось прожектора |
| 2 | - | Отражатель |
| 3 | - | Крышка служебного лючка |
| 4 | - | Разъём ксеноновой лампы DS2 |
| 5 | - | Ксеноновая лампа DS2 |
| 6 | - | Моторедуктор курсового привода регулировки адаптивной фары по горизонтали |
| 7 | - | Привод моторедуктора регулировки по горизонтали |
| 8 | - | Вертикальные оси прожектора |
| 9 | - | Моторедуктор курсового привода регулировки адаптивной фары по вертикали |
| 10 | - | Контроллер ксеноновой фары |
| 11 | - | Крышка контроллера |
| 12 | - | Лампа бокового фонаря с отклоняемой осью (за исключением автомобилей для рынка США) |
| 13 | - | Лампа габаритного фонаря |
| 14 | - | Лампа указателя поворота |
Конструкция адаптивной ксеноновой блок-фары аналогично устройству неадаптивной ксеноновой блок-фары. Для выполнения функции AFS в устройство блок-фары добавлена платформа, на которой размещены узлы AFS. Остальные фонари, входящие в состав ксеноновой блок-фары, не отличаются от описанных ранее. Работа боковых фонарей с отклоняемой осью на адаптивной блок-фаре отличается от работы фонарей бокового освещения при повороте на обычной ксеноновой блок-фаре.
Конструкция платформы имеет радиальный подшипник в верхней части и упорную шайбу в нижней части, которые обеспечивают точки опоры для горизонтальной оси ксенонового прожектора. Конец нижней оси фары имеет шлицы, который вставляется в шлицевое отверстие электродвигателя моторедуктора AFS регулировки по вертикали. Платформа подвешена на двух гибких опорах в верхней части, которые обеспечивают точки крепления вертикальной оси ксенонового прожектора, что позволяет регулировать прожектор по вертикали. Нижняя часть платформы крепится к электродвигателю моторедуктора AFS регулировки по вертикали.
Электродвигатели моторедукторов AFS являются электродвигателями постоянного тока, управление питанием которых осуществляется контроллером AFS. Контроллер AFS также обеспечивает цепь массы электродвигателя.
В состав моторедукторов входит потенциометр, который проводами соединен с позолоченными контактами разъема, подключаемого к контроллеру AFS. Два провода, подсоединенные к каждому моторедуктору, обеспечивают контроллер AFS сигналами обратной связи, что позволяет регулировать положение ксенонового прожектора с высокой точностью.
Для динамической коррекции наклона фар контроллер AFS использует сигналы от передней и задней подвески и управляет электродвигателем моторедуктора в вертикальной плоскости. Кроме того, контроллер AFS регулирует дальность освещения изменением наклона фар, для чего используется сигнал скорости движения, получаемый от контроллера ABS.
Процедура инициации
Процедура инициации системы заключается в приведении осей фар в правильное положение в вертикальной и горизонтальной плоскостях и проводится после получения контроллером AFS сигнала о включении зажигания.
Инициация коррекции наклона фар занимает менее 3 секунд. Электродвигатели коррекции наклона фар из своего исходного положения (крайнее верхнее, крайнее нижнее или любое промежуточное) выводятся в крайнее нижнее положение и затем в горизонтальное положение (наклон оси составляет 0 градусов).
Инициация курсового привода фар AFS начинается менее чем через 1 секунду после инициации электродвигателя коррекции наклона фар, чтобы вертикальная ось фар составляла 0 градусов или менее во избежание ослепления водителей встречного транспорта. Инициация курсового привода фар завершается менее чем за 2,5 секунды. Электродвигатели моторедукторов курсового привода правой и левой фары вначале полностью поворачивают фары из положения 0° внутрь, затем полностью поворачивают их наружу, и после этого снова устанавливают в положение 0°.
Аварийный режим
В случае ошибки в работе системы AFS на приборной панели включается визуальный сигнализатор, предупреждающий водителя о неисправности. Сигнализатор включается при положении II ключа в замке зажигания и не перестает светиться вплоть до устранения неисправности. Сигнализатор системы AFS включается также при неисправности датчика положения рулевого вала или отсутствии сигнала скорости движения автомобиля.
Включение сигнализатора системы AFS не обязательно связано с неисправностью данной системы. Неисправной может быть другая система, от которой зависит работа системы AFS.
Контроллер AFS выполняет диагностику при каждом запросе на активацию системы. Если обнаружена ошибка, то контроллер AFS приостанавливает работу системы.
Если система AFS дала сбой, когда ксеноновый прожектор не направлен прямо вперёд, то контроллер AFS предпримет попытку установить ксеноновый прожектор в нулевое положение (прямо вперёд). В случае невозможности данной регулировки контроллер AFS опустит прожектор с помощью электродвигателей моторедукторов коррекции наклона, чтобы исключить ослепление водителей встречных автомобилей.
Программное обеспечение контроллера AFS позволяет находить собственные внутренние неисправности. При обнаружении собственной неисправности контроллер установит фары в нулевое положение и прекратит дальнейшее управление.
Коды неисправностей можно сканировать при помощи диагностического прибора T4.
Боковые фонари с отклоняемой осью
ПРИМЕЧАНИЕ: * Автомобили для США не оснащаются боковыми фонарями с отклоняемой осью
Боковые фонари с отклоняемой осью предназначены для освещения направления движения при выполнении поворота на низкой скорости. Данные фонари входят в стандартную комплектацию автомобилей с адаптивными блок-фарами. Конструкция рассеивателей позволяет отклонять световой пучок примерно на 45 градусов от оси автомобиля. Управление боковыми фонарями с отклоняемой осью осуществляет блок CJB.
Боковой фонарь с отклоняемой осью встроен в наружную часть блок-фары и находится в одном корпусе с отражателем и боковым габаритным фонарём.
В боковом фонаре с отклоняемой осью используется галогенная лампа H8 мощностью 35 Вт, вставляемая в патрон который соединён проводами с разъёмом на корпусе блок-фары. Патроны вставляются в отверстие корпуса фары и поворачиваются до фиксации. Доступ к лампе возможен через съемную крышку на задней поверхности корпуса фары.
Управление фарами AFS
Управление боковым фонарём с отклоняемой осью основано на сигнале датчика положения рулевого колеса, который принимается контроллером AFS и блоком CJB. Контроллер AFS посылает запрос на включение бокового фонаря с отклоняемой осью в блок CJB, который включает лампу фонаря.
При движении со скоростью свыше 48 км/ч боковой фонарь с отклоняемой осью включается в направлении поворота автомобиля, если угол поворота рулевого колеса достигает 70 градусов. Если поворот автомобиля уменьшается, боковой фонарь с отклоняемой осью выключается, когда угол поворота рулевого колеса достигает 50 градусов.
При движении со скоростью ниже 48 км/ч боковой фонарь с отклоняемой осью включается в направлении поворота автомобиля, если угол поворота рулевого колеса достигает 245 градусов. Если поворот автомобиля уменьшается, боковой фонарь с отклоняемой осью выключается, когда угол поворота рулевого колеса достигает 225 градусов.
Управление боковыми фонарями с отклоняемой осью осуществляет блок CJB. После выхода лампы на рабочий режим блок CJB снижает ее яркость, подавая широтномодулированные сигналы (PWM) в течение приблизительно двух секунд. Когда лампа выключается, блок CJB снижает свечение лампы, уменьшая напряжение сигналов PWM.
АДАПТИВНЫЕ ФАРЫ (AFS). Mazda Techologies
Рестайлинг DISCOVERY 3 в DISCOVERY 4
Discovery 3 ломаем фары. Лайфхак от Петровича ЧАСТЬ 2
ŠKODA SUPERB - система адаптивного освещения / Еврокар
Land Rover Range Rover III Рестайлинг 2 - bi led линзы в адаптивных фарах
Тюнинг ДХО для Land Rover Discovery 3 от студии ALFA-CAR